PHANTOM DEVICE
Haptic
as an adjective relating to the tactile sense which is derived from
the Greek word haptesthai, which means to touch. A Haptic device
involves physical contact between the user and the Computer. This is
done through an input/output device that senses the body movements
such as a joystick, data glove or bodysuit. Haptics provide the user
with the sense of touch on an virtual object. This is done by
synchronizing cursor and the haptic end effector movement. A robotic
arm is moved in real space which is controlled by a series of motors.
To
achieve the sensation which is kinesthetic haptic force must be
calculated every millisecond and submitted to the haptic device. When
the body parts interact with the haptic device a force is returned
which is termed as force feedback depending upon which action will be
performed by the system through the haptic device. Tactile feedback
is used to interact with the nerve endings to feel heat, pressure and
texture. Haptic interfaces are devices that enable manual
interactions with virtual environments or teleoperated remote
systems. They are employed for tasks that are usually performed using
hands in the real world, such as manual exploration and manipulation
of objects. In general, they receive motor action commands fromthe
human user and display appropriate tactual images to the user. Such
haptic interactions may or may not be accompanied the stimulation of
other sensory modalities such as vision and audition.
Haptics,
is the technology used in PHANTOM device(personal haptic interface
omni device). The phantom
haptic interface is a creation of J.Kenneth Salisbury and Thomas
,Massachusetts Institute of Technology(MIT).The
SensAble Technologies produce the phantom device commercially
HISTORY
The
PHANTOM is a convenient desktop device which allows users to reach
beyond the “Looking–Glass” of existing computer monitors, and
actually touch virtual objects represented within the computer. Users
connect to the mechanism by simply inserting their finger into a
thimble. PHANTOM device is a robot arm that is attached to a computer
and used as a pointer in three dimensions, Like a mouse is used as a
pointer in two dimensions.It just like closing eyes,holding a pen and
touching everything in office.The device has enabled users to
interact with and feel a wide variety of virtual objects and will be
used for control of remote manipulators.
New
users of the high technology haptic interfaces are very surprised and
intrigued with the reality oftheir experiences. A blind user was
fooled when the person was able to touch a virtual object. The person
examined the virtual objects surface with finger and was not
surprised at all until reminded that there was no physical object
present. This startled the person because the person jumped and
started reaching out for the nonexistent object with his other hand.
Another example that shows the reality of the experience is the
demonstration of a medical procedure. A needle biopsy is a procedure
in which a doctor inserts a long needle into the brain. When this
procedure has been demonstrated using a haptic device, many doctors’
reactions are that the needle seems a bit dull.This means the doctors
are more concerned with the procedure than they are concerned that it
is only a simulation. The reality of the simulation is also shown
when there is a sudden removal of a certain haptic device simulation.
It is explained as being similar to when a person who is going to sit
down is unaware that the chair has been pulled out. Haptic
interactions give the user the illusion that they are dealing with
real, physical objects. Interactions to this extent of reality in
this new field are motivation for this topic.
TECHNOLOGY
FOCUS
The
PHANTOM is a convenient desktop device which provides a
force-reflecting interface between a human user and a computer. Users
connect to the mechanism by simply inserting their index finger into
a thimble. The PHANTOM tracks the motion of the user’s fingertip
and can actively exert an external force on the finger, creating
compelling illusions of interaction with solid physical objects. A
stylus can be substituted for the thimble and users can feel the tip
of the stylus touch virtual surfaces.
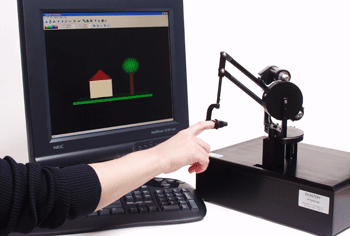
The
phantom allows the user to interact with a variety of virtual
objects. The device exerts an external force on the computer user
with force feedback that gives the illusion of interaction with solid
physical objects. Figure shows a typical phantom device.The
phantom is an electromechanical desktop device that connects to the
computer’s input/output port. The user inserts a finger into a
thimble or holds a stylus supported by a mechanical arm. The thimble
or stylus will then track the motions and position of the user’s
Fingertip while applying forces on the user.

Phantom Device
The
phantom system is controlled by three direct current(DC) motors that
have sensors and encoders attached to them. The number of motors
corresponds to the number of degrees of freedom a particular phantom
system has, although most systems produced have 3 motors. The
encoders track the users motion or position along the x, y and z
coordinates and the motors track the forces exerted on the user along
the x, y and z axis. From the motors there is a cable that connects
to an aluminum linkagewhich connects to a passive gimbal which
attaches to the thimble or stylus. A gimbal is a device that permits
a body freedom of motion in any direction or suspends it so that it
will remain level at all times. As explained later in the paper,
because the three degrees of freedom meet at one contact point, no
torque is measured, only force applied to the point. Friction and
inertia must be constant to limit distractions of the user. Also, the
haptics system must be able to analyze and sense the forces applied
by the user and then deliver the sensation back in real time.
The
phantom was designed under a few important considerations, first
among them being:In the physical world the person impose forces on
himself whenever touch anything. These forces and the position and
motion of hand and arms are transmitted to the brain as kinesthetic
information. This information along with cutaneous (touch) senses,
force and motor capabilities are what allow us to touch and
manipulate objects and relate them to the space around us. The
phantom haptics system must also be able to interpret force and
motion information. It must be able to determine how objects move
when forces are applied and also determine the geometry of the object
(texture and friction of the surface of the object). Events tracking
the change in position or motion of the probe, collision detection
between the object and another object or the probe, explained later
in the paper, are all important.
The
phantom was designed with three degrees of freedom because very
little torque (twisting-rotating) is involved with either the thimble
or the stylus. Degrees of freedom are the directions the user can
move in. For a user to touch all sides of a virtual 3-dimensional
object the haptics system needs 3 degrees of freedom.
Another
3 degrees of freedom are needed if a user wants to rotate the object
freely.Because the first Phantom haptic interface that was created
uses only 3 degrees of freedom, it allows the system to model those 3
degrees of freedom as a point contact in the virtual environment.
This simplifies programming because with a point contact there is
little torque, therefore it is less complex. These considerations
were combined into three main criteria to attain a balanced,
effective system.
FREE
SPACE MUST FEEL FREE: There cannot
be any external forces present and there must be low inertia and
little friction. The Phantom system.s friction is measured at less
than .1 Newton (Nt). For inertia a user feels no more than 100 grams
of mass and the unbalanced weight is less than .2 Nt at all points in
the workspace.
VIRTUAL
OBJECTS MUST FEEL STIFF: The second
criterion is that the virtual objects must be perceived as stiff. The
virtual object or surface can only be as stiff as the control
algorithm allows it to be. The maximum stiffness is about 35 Nt/cm.
Although according to Massie and Salisbury, most users will be
convinced of a stiff surface at 20 Nt/cm. Sound is also a factor in
the stiffness of virtual objects. If a user touches a hard surface
and they hear a knock; the user is likely to accept the surface as
stiff.
VIRTUAL
CONSTRAINTS MUST NOT BE EASILY SATURATED: The third criterion is that
virtual walls must be solid or immovable to the user. This means that
the force exerted by the user must be counteracted by the phantom
system. The maximum force the system can exert is only 10 Nt of
force. However, it has been shown that during precise manipulation a
user exerts 10 Nt or less of force, but on average a user only exerts
1 Nt of force, while maximum continuous force capability for the
phantom is 1.5 Nt . Therefore, the system is capable of responding to
regular manipulation activities.
The
phantom needs to match the human sensory, motor and cognitive
systems. The system does not have to completely replicate a normal
human being but the touch sense is harder to replicate than vision or
hearing.
A
good example is that to match human vision only 30 to 60 frames per
second are needed for the viewer to believe constant motion. Human
touch is far more sensitive and therefore the motors. information
must be updated 1, 000 times per second to provide a continuous
feeling.
BLOCK
DIAGRAM

Block Diagram
DESCRIPTION
Basically
a haptic system consist of two parts namely the human partand the
machine part.In the figure shown above, the human part (left)
senses and controls the position of the hand, while the machine
part(right) exerts forces from the hand to simulate contact with a
virtual object.Also both the systems will be provided with necessary
sensors, processors and actuators.In the case of the human system,
nerve receptors perform sensing, brain performs processing and
muscles perform actuation of the motion performed by the hand.While
in the case of the machine system, the above mentioned functions are
performed by the encoders, computer and motors respectively.
SPECIFICATION
GEOMAGIC TOUCH HAPTIC DEVICE
Force
feedback workspace
|
~6.4
W x 4.8 H x 2.8 D in > 160 W x 120 H x 70D mm
|
|
Footprint
(Physical area device base occupies on desk)
|
6
5/8 W x 8 D in ~168 W x 203 D mm
|
|
Weight
(device only)
|
3
lbs 15 oz
|
|
Range
of motion
|
Hand
movement pivoting at wrist
|
|
Nominal
position resolution
|
||
Backdrive
friction
|
<
1 oz (0.26 N)
|
|
Maximum
exertable force at nominal (orthogonal arms) position
|
0.75
lbf (3.3 N)
|
|
Continuous
exertable force (24 hrs)
|
0.2
lbf (0.88 N)
|
|
Stiffness
|
X
axis > 7.3 lbs / in (1.26 N / mm)
Y axis > 13.4 lbs / in (2.31 N / mm) Z axis > 5.9 lbs / in (1.02 N / mm) |
|
Inertia
(apparent mass at tip)
|
~0.101
lbm (45 g)
|
|
Force
feedback
|
x,
y, z
|
|
Position
sensing [Stylus gimbal]
|
x,
y, z (digital encoders)
[Pitch, roll, yaw (± 5% linearity potentiometers) |
|
Interface
|
IEEE-1394
FireWire port: 6-pin to 6-pin
|
|
Supported
platforms
|
Intel
or AMD-based PCs
|
|
OpenHapticsToolkit
compatibility
|
Yes
|
|
Applications
|
Selected
Types of Haptic Research, FreeFormModelingsystem, ClayTools
system
|
Touch Device
GEOMAGIC TOUCH X HAPTIC DEVICE
Force
feedback workspace
|
~6.4
W x 4.8 H x 4.8 D in > 160 W x 120 H x120 D mm
|
Footprint
(Physical area device
Base
occupies on desk)
|
5
5/8 W x 7 1/4 D in ~143 W x 184 mm
|
Weight
(device only)
|
6
lbs 5oz
|
Range
of motion
|
Hand
movement pivoting at wrist
|
Nominal
position resolution
|
>
1100 dpi ~ 0.023 mm
|
Backdrive
friction
|
<
0.23 oz (0.06 N)
|
Maximum
exertable force at
nominal
(orthogonal arms) position
|
1.8
lbf (7.9 N)
|
Continuous
exertable force (24hrs)
|
0.4
lbf (1.75 N)
|
Stiffness
|
X
axis > 10.8 lbs / in (1.86 N / mm)
Y axis > 13.6 lbs / in (2.35 N / mm) Z axis > 8.6 lbs / in (1.48 N / mm) |
Inertia
(apparent mass at tip)
|
~0.101
lbm (45 g)
|
Force
feedback
|
x,
y, z
|
Position
sensing [Stylus gimbal]
|
x,
y, z (digital encoders)
[Pitch, roll, yaw (± 3% linearity
potentiometers)
|
Interface
|
Parallel
port and FireWire option*
|
Supported
platforms
|
Intel
or AMD-based PCs
|
OpenHapticsToolkit
compatibility
|
Yes
|
Applications
|
Selected
Types of HapticResearch,FreeFormModelingsystem,
ClayTools
system
|
Touch X
PHANTOM PREMIUM HAPTIC DEVICES

Phantom Premium

Phantom Premium 6 DOFs
IMPLEMENTATION
GEOMAGIC TOUCH HAPTIC DEVICE
The
Geomagic Touch (formerly Sensable Phantom Omni) is the industry’s
most widely deployed professional haptic device. Used in research, 3D
modeling, OEM applications and more, Touch allows users to freely
sculpt 3D clay, enhance scientific or medical simulations, increase
productivity with interactive training, and easily maneuver
mechanical components to produce higher quality designs.
Touch
is a motorized device that applies force feedback on the user’s
hand, allowing them to feel virtual
objects and producing true-to-life touch sensations as user
manipulates on-screen 3D objects. Leading companies integrate the
Geomagic Touch and haptics into their work to achieve compelling
solutions using the realistic sense of touch.
Touch
can be used in diverse applications, including: simulation, training,
skills assessment, rehearsal, virtual assembly, robotic control,
collision detection, machine interface design, rehabilitation,
mapping and dozens of other applications.
When
used with OpenHaptics
toolkit, Touch allows
developers to rapidly design and deploy haptic programs, do mash-ups
into existing applications, try out new ideas, and create haptically
enabled products. Touch is also sold as a component of Geomagic
Freeform and Geomagic
Clay tools modeling
systems.
Features
-
Portable design and compact footprint allow greater user flexibility
-
Supports a broad range of haptic applications with six-degree-of-freedom positional sensing and 3-degree-of-freedom force feedback
-
CE certified
-
Easy-to-use design with removable stylus and two integrated momentary stylus switches
-
Quick installation and FireWire port interface

GeomagicTouch Haptic Device
GEOMAGIC TOUCH X HAPTIC DEVICE
The
award-winning Geomagic Touch X (formerly Sensable Phantom Desktop)
pushes haptic capabilities to the next level, providing more precise
positioning input and high-fidelity force-feedback output. For 3D
modeling and design, surgical training, virtual assembly and other
procedures that require a higher degree of precision, Touch X is an
easy-to-use, affordable option.
The
Geomagic Touch X haptic devices allow users to feel 3D on-screen
objects by applying force feedback on the user’s hand, and the
Touch X delivers expanded true-to-life sensations with a more fluid
feel and lower friction. Its durability, affordability and accuracy
make the Touch X haptic device ideal for commercial, medical and
research applications, especially when compactness and portability
matter.
Leading
OEMs choose the Touch X and integrate it into their products, as its
valuable in a number of interactive virtual environments, like
surgical simulators and machine component visualization.

Geomagic
Touch X Haptic Device
Features
-
CE certified
-
Six-degree-of-freedom positional sensing
-
High-fidelity force feedback, stronger forces and lower friction produce a more realistic touch experience
-
Automatic workspace calibration
-
Compact footprint and portable design allow for flexible desktop operation
-
Single integrated momentary switch on the stylus allows for end-user customization and ease of use
PHANTOM PREMIUM HAPTIC DEVICES
The
Geomagic Phantom Premium (formerly Sensable Phantom Premium) haptic
devices fulfill the requirements of a vast range of research and
commercial applications. These high-precision devices provide the
largest workspaces and highest forces in the Phantom line while
offering a broad range of force feedback workspaces, various ranges
of motion and varying stiffness. Phantom Premium haptic devices also
come in 6DOF
models, which offer six
degrees of freedom (3 translational, 3 torque) in output
capabilities.
PHANTOM PREMIUM 1.0
The
Premium 1.0 haptic device provides a range of motion approximating
hand movement pivoting at the wrist. This device includes a passive
stylus and thimble gimbal and provides 3 degrees of freedom
positional sensing and 3 degrees of freedom force feedback. An
encoder stylus gimbal can be purchased separately, enabling the
measurement of an additional 3 degrees of positional sensing (pitch,
roll & yaw). The Premium 1.0 device connects to the PC via the
parallel port (EPP) interface.
Phantom
Premium 1.0
PHANTOM PREMIUM 1.5 & 1.5 HIGH FORCE
The
Premium 1.5 haptic device provides a range of motion approximating
lower arm movement pivoting at the elbow. This device includes a
passive stylus and thimble gimbal and provides 3 degrees of freedom
positional sensing and 3 degrees of freedom force-feedback. An
encoder stylus gimbal can be purchased separately, enabling the
measurement of pitch, roll & yaw. A PHANTOM Premium 1.5 HF
(High Force) device is also available, and includes a built-in gear
box option that provides higher forces. The thimble attachment is
currently not available.

Phantom
Premium 1.5 & 1.5 HF
PHANTOM PREMIUM 3.0
The
Premium 3.0 haptic device provides a range of motion approximating
full arm movement pivoting at the shoulder. This device includes
either a finger sled or a handle gimbal (choice of one) and provides
3 degrees of freedom positional sensing and 3 degrees of freedom
force feedback. An encoder stylus gimbal can be purchased separately,
enabling the measurement of an additional 3 degrees of positional
sensing (pitch, roll & yaw). The encoder-stylus, finger sled and
handle gimbal arm assemblies may also be purchased separately and can
be installed by the user. The Premium 3.0 device connects to the PC
via the parallel port (EPP) interface.

Phantom
Premium 3.0
GEOMAGIC PHANTOM PREMIUM 6DOF
The
premier haptic products in the Geomagic Phantomline, (formerly
Sensable) Phantom Premium 6DOF haptic devices offer highly accurate
3D object manipulation and allow users to explore application areas
that require force feedback in six degrees of freedom rather than
three, such as virtual prototyping, maintenance path planning and
molecular modeling.
In
addition to force feedback along the x-, y- and z-axis, the Phantom
Premium 6DOF haptic device simulates torque force feedback in three
rotational degrees of freedom: yaw, pitch and roll. Incorporating six
degrees of freedom, these motorized devices provide more complete
touch-based feedback that allows users to feel collision and reaction
torques on a part in a virtual assembly path or feel the rotational
torques supported by a remote slave robot in a teleoperation
environment.
The
Phantom Premium 6DOF family of haptic devices is comprised of three
models. The Phantom Premium 1.5/6DOF and 1.5HF/6DOF provide a range
of motion approximating lower arm movement pivoting at the elbow. A
larger haptic device, the Phantom Premium 3.0 6DOF provides a greater
range of motion, approximating full arm movement pivoting at the
shoulder.
Phantom
Premium 6DOF devices can also be fitted with optional end effectors
that provide pinch functionality, simulating a seventh degree of
freedom, for application in medicine, manufacturing and more.
PHANTOM PREMIUM 1.5 AND 1.5 HIGH FORCE 6DOF
The
Phantom Premium 1.5/6DOF and 1.5HF/6DOF haptic devices provide a
range of motion approximating lower arm movement pivoting at the
elbow. These devices provide force feedback in three translational
degrees of freedom as well as torque feedback in three rotational
degrees of freedom in the yaw, pitch and roll directions. The Premium
1.5HF device includes a built-in gear box option that provides higher
forces. The 1.5/6DOF and the 1.5HF/6DOF devices connect to the PC via
the parallel port (EPP) interface.
The
1.5/6DOF and 1.5HF/6DOF devices now ship with chrome components. If
using these devices with optical tracking equipment.

Phantom
Premium 1.5 & 1.5 HF 6DOF
PHANTOM PREMIUM 3.0 6DOF
The
3.0/6DOF provides a range of motion approximating full arm movement
pivoting at the shoulder. This device provides force feedback in
three translational degrees of freedom as well as torque feedback in
three rotational degrees of freedom in the yaw, pitch and roll
directions. The 3.0/6DOF device connects to the PC via the parallel
port (EPP) interface.
The
3.0/6DOF device now ships with chrome components. Using this device
with optical tracking equipment.

Phantom
Premium 3.0 6DOF
7 DOF OPTION FOR OHANTOM 6DOF DEVICES
A
new handle design for the PHANTOM 6 DOF family of haptic devices
enables attaching interchangeable end effectors that provide pinch
functionality -- 7 DOF positional sensing and 6 DOF haptic feedback.
Take advantage of all the benefits of a full 6 DOF haptic controller
plus the option to add two different pinch grips.

7DOF
GEOMAGIC CLAYTOOLS
The
Geomagic Claytools modeling system delivers unparalleled modeling
speed and creative expression, and it is ideal for sculptural
modeling of complex, organic shapes for digital content creation and
fine arts such as sculpture and portions of jewelry design. It is
also used in fine arts and industrial design educational programs to
teach sculptural 3D modeling. Geomagic Claytools files are compatible
with Geomagic's manufacturing-oriented modeling systems: Freeform and
Freeform Plus.
The
Claytools system includes the Geomagic Touch haptic device, i.e., a
true 3D interface with force feedback that enables you to use your
sense of touch to create virtual clay models. This natural and direct
way of working makes the Claytools system easy to learn, and users
typically become productive within a few days.
SCULPTURAL MODELING FOR FINEARTS, JEWELRY DESIGN & DIGITAL
CONTENT CREATION
The
GeomagicClaytools modeling system delivers unparalleled modeling
speed and creative expression, and it is ideal for sculptural
modeling of complex, organic shapes for digital content creation and
fine arts such as sculpture and portions of jewelry design. It is
also used in fine arts and industrial design
educational programs to teach sculptural 3D modeling.
GeomagicClaytools files are compatible with Geomagic's
manufacturing-oriented modeling systems: Freeform and Freeform Plus.
The
Claytools system includes the Geomagic Touch haptic device,
i.e., a true 3D interface with force feedback that enables to use
sense of touch to create virtual clay models. This natural and direct
way of working makes the Claytools system easy to learn, and users
typically become productive within a few days.
Concept Design

Concept Design
Jewelery Design
Easily
design and sculpt intricate objects such as jewelry and collectibles.
Quickly form minute details in the designs that differentiate from
the rest of the pack through infinite attention to detail. Easily
output the data to a 3D printing system, and create a wax pattern for
casting unique designs.

Jewelry Design
Capture Imagination
Want
to take imagination to the limit? GeomagicClaytools offers the
flexibility to create digital sculptures as easily as would with real
clay. Often used for game, entertainment and filmmaking, this
software allows designers to push, pull, sculpt and detail
easily ... and without a long learning curve.


Capture Imagination
GEOMAGIC CLAYTOOLS FEATURES
-
Model in a faster, unconstrained, and more flexible way
-
Add organic detailing and texturing to jewelry designs
-
Produce highly detailed models for game characters, props, and scenery
-
Add sculptural details, handcrafted modifications, and embossed textures to existing models
-
Create texture maps from high-res, detailed models to apply to optimized poly models for games, videos, and films
-
Gain the benefits of digital modeling - create multiple versions, duplicate handcrafted modifications, and create and use a library of parts
-
Output for Rapid Prototyping or casting
-
Expand existing design and modeling workflows
-
Use with 3ds Max, Maya, Rhino, and other design applications that support .stl and .obj I/O
CLAYTOOLS TEXTUREKLIN
-
Allows Texture baking at blazing fast speed.
-
Provides stunning visual content for real-time rendering and fast, high-detail, off-line rendering
-
Supports multiple map types (normal, height, color, and occlusion) for next-generation games, film, and design production pipelines
-
Large models - supports pieces each with over 20 million triangles
-
Streamlined - no need to decimate or export dense models to 3ds Max, Maya, and other animation packages
-
Quick iterations - maximize creativity and refine the final textured model without preprocessing steps
ADVANTAGES
SIZE
The
way that the phantom haptic interface has been designed gives it
advantages over other haptic devices. Its size resembles a small desk
lamp and its workspace is about the size of a mouse pad. The size
gives the user the ability to work with the device on their desktop
while still having enough workspace to use it freely.
FIDELITY
Exoskeletal
devices do not allow this much freedom of motion while at the same
time having high fidelity. For example,gloves provide more degrees of
freedom but with less precision. The system operates on point contact
and has much higher fidelity; therefore it can be used for highly
technological applications.
RANGE OF APPLICATIONS
The
phantom setup allows the stylus or thimble to function as surgical
tools, paint brushes or other tools depending on the application.
Other devices do not allow for such wide ranges of use.
COST
Phantom
is a low cost device.so it is widely used when compared to other
haptic devices.
One
of the greatest advantages of the Phantom hapticinterface is that it
has a wide variety of applications
MEDICAL FIELD
One
of the first broad applications is in training people to perform real
world tasks. In the field of medicine, touch is an important sense.
It has been one of the most researched topics in haptics. Medical
students need to train in performing procedures usually done on live
patients, gaining skill as time goes on. The phantom provides these
students with the ability to train on surgical simulators. This
reduces the training time of the students and allows them to train on
more complex operations before actually operating. The simulation
could be recorded and later observed for evaluation or skill level
verifications on the procedure. The surgery can also be recorded so
that the student can feel the doctor’s prerecorded procedure. The
phantom is ideal for minimally invasive surgeries like laparoscopy
and arthroscopy in which the doctors must insert long tools with
cameras to view the operation. In these procedures there is no direct
contact. The phantom’s setup, precision and high fidelity can
greatly enhance the quality of these surgeries.
3D MODELING
3D
modeling or clay modeling gives users the ability to work with a
virtual surface or ball made out of digital clay. Complex shapes can
be created or manipulated. The difficulty of the interaction with the
physical world and digital world has kept many designers working with
the more familiar, real clay models. The first, major computer
animation movie Toy Story began to change this, but still the
designers modeled with clay before digitizing. The digitization
process is very difficult due to possible errors. For this reason
modelers want a new system. Industrial designers and modelers can
benefit from the application because 3D modeling packages have many
benefits over classic software for four main reasons. Touch providing
feedback helps to position the object correctly in 3D space, it helps
make the visualization clearer by letting the user feel the models,
and assists in the communication of the physical properties of the
model. The fourth reason is that force feedback lets users
continuously manipulate the objects. The programs will then let
thedesigners work with more creativity.
ASSISTIVE TECHNOLOGY FOR THE BLIND AND VISUALLY IMPAIRED
Feel
maps that are displayed on the internet and also learn mathematics by
tracing touchable mathematical course .most haptic systems still rely
heavily on a combined visual/haptic interface
MUSEUM DISPLAY
For
3D digitization of priceless artifacts and objects from their
sculpture and decorative arts collections, making the images
available via CD-ROM.
ENTERTAINMENT
Haptics
is used to enhance gaming experience.software also allows to program
force feedback sensations to game controller button
press."Submarines" is a PHANTOM variant of the well known
battleship game
HOLOGRAPHIC INTERACTION
The
feedback allows the user to interact with a hologram and
receive tactile response as if the holographic object were real
.Ultrasound waves to create a phenomenon called acoustic
radiation pressurewhich provides
tactile feedback as users interact with the holographic object.
DRAWBACKS
There
are certain problems and limitations present with haptic interfaces.
Until recently, research has concentrated on the devices themselves.
Now however, software developers are working to meet the needs of
these haptic devices. For most haptic interfaces the software is
included in the complete setup. Haptic models require much more
computing power than computer graphics programs. Haptic options have
not been designed into the software and it is nearly impossible to
integrate haptic features into existing software packages. This makes
it difficult because new software programs must be written.
.
REFERENCES
[1]
http://www.sensable.com/phantom/documents/documents/ASME94.pdf
[2]
http://www.scribd.com/doc/32999510/Phantom
[3]
http://sciencestage.com/d/1134205/phantom-haptic-interface-and.html
[4]
http://www.sensable.com/haptic-phantom-desktop.htm
[5]
http://citeseerx.ist.psu.edu/viewdoc/dow...1&type=pdf
[6]
http://www.geomagic.com